Noval Control Model for Industrial Applications
Recently, a research group led by Prof. GUO Ming from Xi’an Institute of Optics and Precision Mechanics, Chinese Academy of Sciences proposed a robust internal model control scheme to solve the obstacles in current control systems.
The study was published in ISA Transactions.
It is well known that model uncertainties and external disturbances severely hinder the utilization of precise models in control systems. Although several methods have been proposed including disturbance observer (DOB) control and extended state observer (ESO) control, these methods are too complex for large-scale industrial applications.
Therefore, the researchers proposed a robust internal model control (RIMC) scheme, which combines the advantages of both DOB and ESO. The model was experimentally verified in the two-inertia system. The results indicate that this model can reduce the influence of disturbances to near zero.
In specific, the two degrees of freedom internal model control and cascade integrator paradigm were adopted in RIMC, helping it keep invariance under the external disturbance and internal uncertainty. As for the robust internal model control, the generalized ESO (GESO), which exhibits disturbance compensation capability and it is suitable for the design of a feedforward controller, is employed to develop the framework of RIMC.
Scientists found that the performances of RIMC are much superior than that of previously presented method in the two-inertia system, including tracking performance, robustness to load inertia variation, robustness to joint stiffness variation, and disturbance rejection.
“This study opens a new path for industrial applications of control methods based on exact models,” said Prof. GUO Ming.
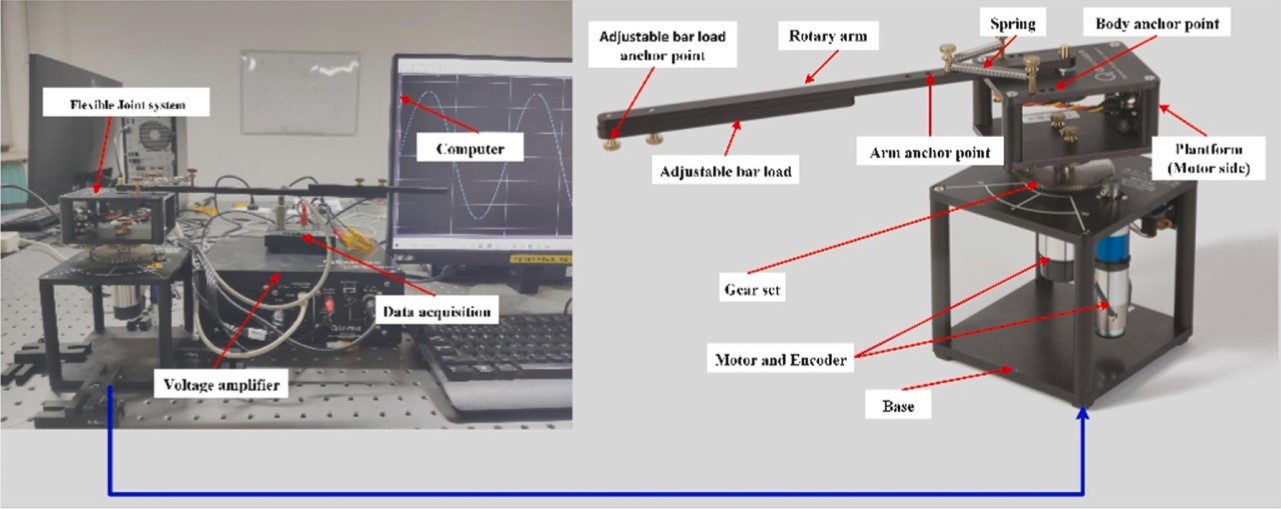
Fig. Experimental setup. (Image by XIOPM)
